Trust Model for MH-MR
Introduction
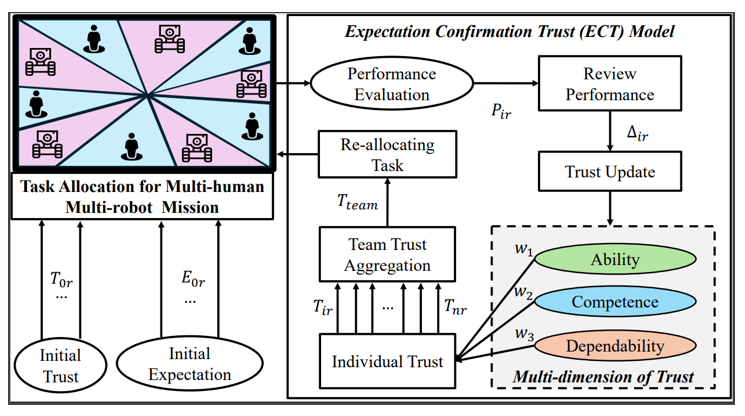
Trust is essential in human-robot collaboration,particularly in multi-human, multi-robot (MH-MR) teams,where it plays a crucial role in maintaining team cohesionin complex operational environments. Despite its importance,trust is rarely incorporated into task allocation and reallocationalgorithms for MH-MR collaboration. While prior research insingle-human, single-robot interactions has shown that integrating trust significantly enhances both performance outcomes anduser experience, its role in MH-MR task allocation remainsunderexplored. In this paper, we introduce the ExpectationConfirmation Trust (ECT) Model, a novel framework formodeling trust dynamics in MH-MR teams. We evaluate theECT model against five existing trust models and a no-trustbaseline to assess its impact on task allocation outcomes acrossdifferent team configurations (2H-2R, 5H-5R, and 10H-10R).Our results show that the ECT model improves task successrate, reduces mean completion time, and lowers task error rates.